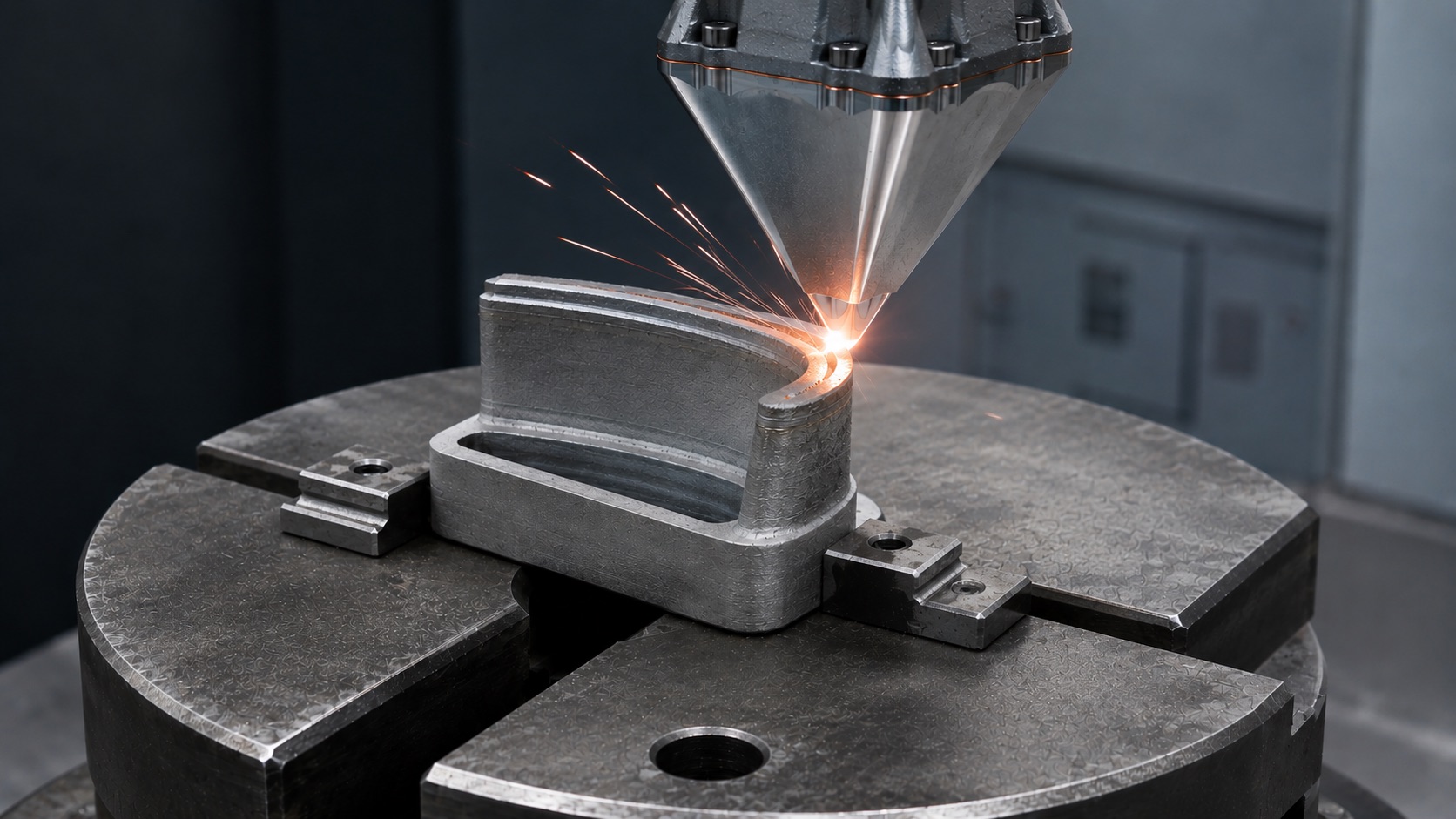
DED cladding
Avoid long lead times, save material costs. (WAAM, Plasma, Laser)
The problem.
Every worn part is geometrically unique. An eroded impeller, a chewed-up drill head, a corroded valve seat. Each one needs a custom robotic torch path that follows the wear surface, controls heat input, and stays within the robot's reach.
Today, that programming takes hours of manual work from a specialist who understands both welding metallurgy and robot kinematics. That person is rare. The work queues behind them. Smaller repair shops turn jobs away entirely because they don't have one.
CAD to weld path in minutes.
Load the part geometry, define the deposition zone, and Flexam generates surface-following cladding toolpaths automatically. The entire pipeline runs before the robot moves.
Non-planar toolpaths that hug the actual wear geometry. No flat-layer stacking. Less material deposited, less machining afterward.
The slicer adjusts wire-feed and travel speed across each pass. Beads narrow at curves, widen on flats. Consistent coverage without manual parameter tweaking.
Pass order is chosen to prevent heat accumulation in the substrate. Inter-pass cooling is built into the program, not left to the operator's judgment.
Every pass is validated against the robot's kinematic model and the fixturing in the cell. Problems are caught at planning time, not at 2 AM on the shop floor.
RAPID for ABB, KRL for KUKA, TP for Fanuc, or UR Script for Universal Robots can be configured for the target controller and validated on the defined cell.
What changes.
Programming time per repair drops from hours to minutes. A technician with welding knowledge but no CAM experience can set up a job. The economics of repair shift: parts that were borderline "just replace it" become worth cladding. Shops that turned away one-off repair work can take it on.
One model, one toolpath, repeatable across cells. Two shops with different robots get the same result without trading specialists between them.
Built for.
Mining, oil and gas, dredging, heavy machinery, power generation. Any operation where worn metal components are expensive to replace and geometrically unique.
Have a worn component and a robot cell?
Send us the part geometry and we'll show you what the toolpath looks like.